I tried to dampen the magnetic field on my motor pulley by covering it with a steel washer, but I didn't see any difference in the readings and left it in place.
I ran the motor for a while to get a sizable data set and processed it to get the min, max, span, and average for three subsequent readings. I graphed the results, which were astoundingly consistent compared to everything I've seen. I changed speed during the test, and it was perfectly reflected in the graph where the min, max, and average were on top of each other. The span, or difference between min and max, was typically at zero, suggesting consistent measurements.
 The span is almost zero
The span is almost zero
I tried removing the low-time threshold from my interrupt code, but the ESC acted erratically, so I returned it. I began coding a function to calculate the running average of three or more readings. I thought about the data where even readings were consistently higher than odd ones and calculated the average of subsequent measurements, which didn't require heavy coding. I also changed the output to print RPMs instead of microsecond delays. The result showed a steady line, with a few blips, but a tachometer confirmed my readings were doubled.
The hall effect has some jitter, which I defeated with potentiometer adjustments and a minimum requirement. The sensor triggers a second time each rotation, which I overcame by averaging measurement pairs and dividing by two.
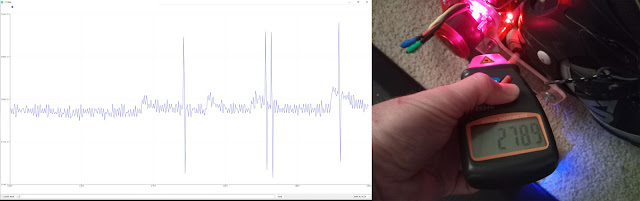 The graph matches the measurement
The graph matches the measurement
The rest of the posts for this project have been arranged by date.
First time here?
Completed projects from year 1
Completed projects from year 2
Completed projects from year 3
Completed projects from year 4
Completed projects from year 5
Completed projects from year 6
Completed projects from year 7
Completed projects from year 8
Disclaimer for http://24hourengineer.blogspot.com and 24HourEngineer.com
This disclaimer must be intact and whole. This disclaimer must be included if a project is distributed.
All information on this blog, or linked by this blog, is not to be taken as advice or solicitation. Anyone attempting to replicate, in whole or in part, is responsible for the outcome and procedure. Any loss of functionality, money, property, or similar, is the responsibility of those involved in the replication.
All digital communication regarding the email address 24hourengineer@gmail.com becomes the intellectual property of Brian McEvoy. Any information contained within these messages may be distributed or retained at the discretion of Brian McEvoy. Any email sent to this address, or any email account owned by Brian McEvoy, cannot be used to claim property or assets.
Comments to the blog may be utilized or erased at the discretion of the owner. No one posting may claim property or assets based on their post.
This blog, including pictures and text, is copyright to Brian McEvoy.
2022-11-16
I ran the motor for a while to get a sizable data set and processed it to get the min, max, span, and average for three subsequent readings. I graphed the results, which were astoundingly consistent compared to everything I've seen. I changed speed during the test, and it was perfectly reflected in the graph where the min, max, and average were on top of each other. The span, or difference between min and max, was typically at zero, suggesting consistent measurements.

I tried removing the low-time threshold from my interrupt code, but the ESC acted erratically, so I returned it. I began coding a function to calculate the running average of three or more readings. I thought about the data where even readings were consistently higher than odd ones and calculated the average of subsequent measurements, which didn't require heavy coding. I also changed the output to print RPMs instead of microsecond delays. The result showed a steady line, with a few blips, but a tachometer confirmed my readings were doubled.
The hall effect has some jitter, which I defeated with potentiometer adjustments and a minimum requirement. The sensor triggers a second time each rotation, which I overcame by averaging measurement pairs and dividing by two.

The rest of the posts for this project have been arranged by date.
First time here?
Completed projects from year 1
Completed projects from year 2
Completed projects from year 3
Completed projects from year 4
Completed projects from year 5
Completed projects from year 6
Completed projects from year 7
Completed projects from year 8
Disclaimer for http://24hourengineer.blogspot.com and 24HourEngineer.com
This disclaimer must be intact and whole. This disclaimer must be included if a project is distributed.
All information on this blog, or linked by this blog, is not to be taken as advice or solicitation. Anyone attempting to replicate, in whole or in part, is responsible for the outcome and procedure. Any loss of functionality, money, property, or similar, is the responsibility of those involved in the replication.
All digital communication regarding the email address 24hourengineer@gmail.com becomes the intellectual property of Brian McEvoy. Any information contained within these messages may be distributed or retained at the discretion of Brian McEvoy. Any email sent to this address, or any email account owned by Brian McEvoy, cannot be used to claim property or assets.
Comments to the blog may be utilized or erased at the discretion of the owner. No one posting may claim property or assets based on their post.
This blog, including pictures and text, is copyright to Brian McEvoy.
2022-11-16
Comments
Post a Comment